Grasp-O-Matic
RGB-D 6D Grasp Pose for Unknown Objects

Overview
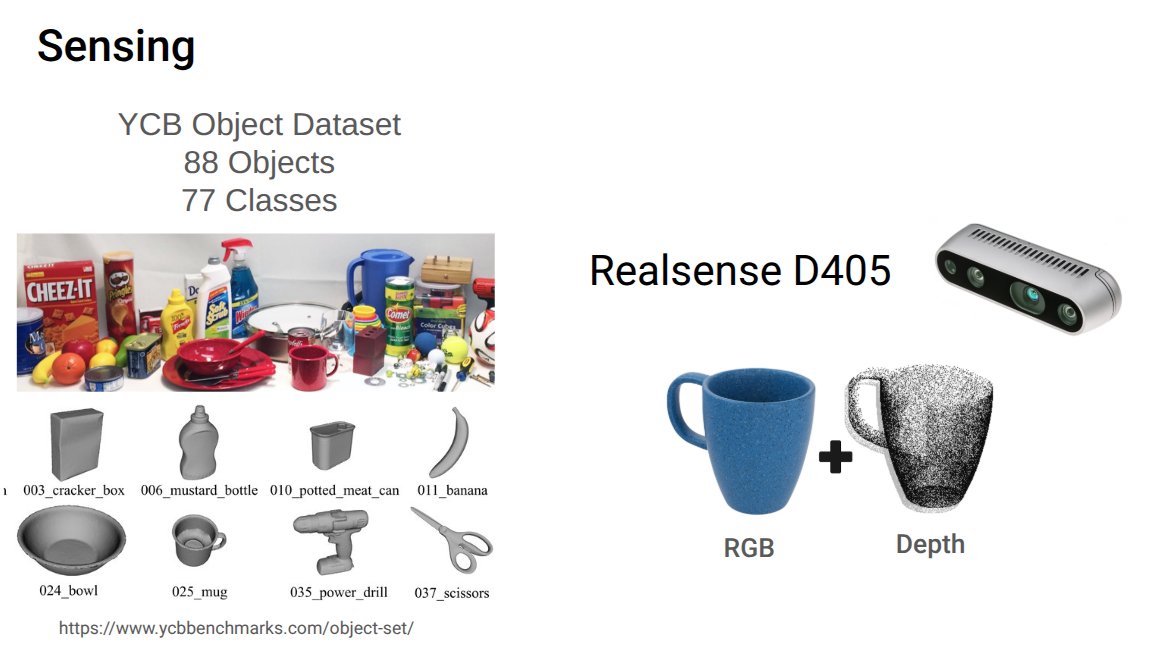
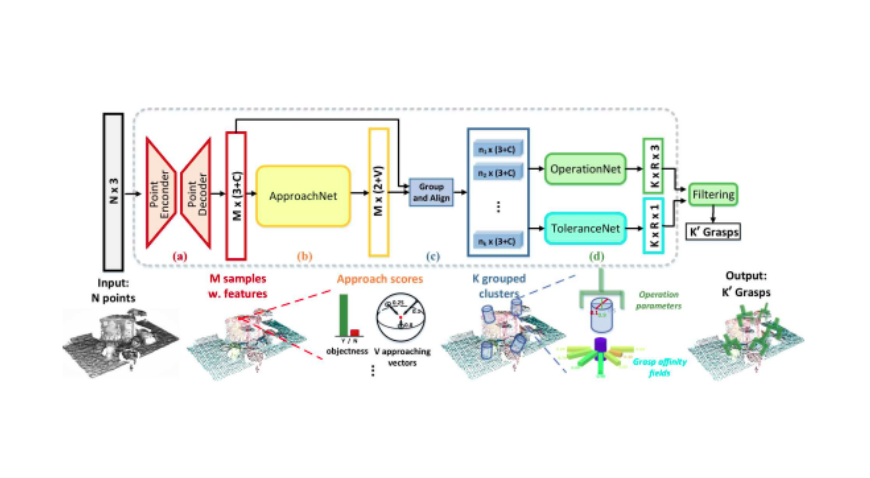
This project seeks to explore a pipeline for general manipulation. The goal of this project is to provide a pipeline that enables a 6DOF robot with parallel end effector to grasp general objects as prompted by a user. To accomplish this we use a combination of prompt based foundation models and point cloud processing to generate optimal grasp poses. We use Grounding Dino for prompt based object bounding which is followed by SAM 2 for segmentation masking of the desired object and lastly we apply NVIDIA Contact GraspNet for grasp pose generation.

Problem Statement