BaxToTheFuture
Teaching Old Arms New Tricks with VLAs
In Progress
Northwestern University
Overview
While modern Vision-Language-Action (VLA) models excel at bimanual manipulation on rigid, contemporary platforms, their ability to generalize across drastically different hardware is an active area of research. This project upgrades a 2012 Rethink Baxter with a native ROS 2 stack to evaluate how these models perform with a highly compliant embodiment.
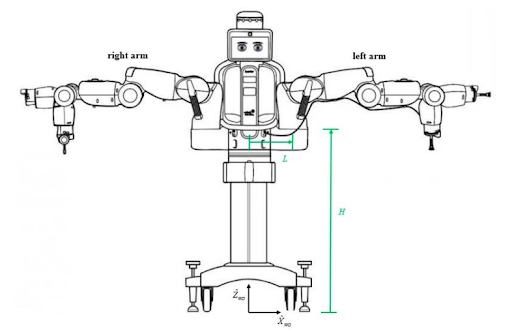
Pioneering the era of collaborative robotics, Baxter was engineered with Series Elastic Actuators (SEAs) to safely operate alongside humans. Unlike modern rigid manipulators, this architecture introduces inherent joint elasticity and complex transmission dynamics. The core focus of this work is to probe how current end-to-end imitation learning frameworks handle high intrinsic compliance during bimanual manipulation tasks, and what it takes to transfer modern policies to a platform characterized by significant kinematic uncertainty.

Week 1
“Hello World”
Bridged the legacy SDK via a ROS 1 Docker container, establishing ROS 1 communication and live joint control.