Impact Dynamcis 2D Dice Simulation

Overview
This project details the hardware and software implementation of a General-Purpose Multi-Agent Robotics System (GP-MARS). The system is designed to provide a flexible and versatile platform for implementing and testing a wide variety of multi-agent algorithms by utilizing a distributed control architecture and the Robot Operating System (ROS).
Problem Statement
While multi-unit robotic systems offer significant advantages over single-unit robots, such as cooperative problem-solving and redundancy, building general-purpose test platforms is challenging. Previous multi-unit projects at Hope College used a centralized control model that was hardware-dependent. The need was to create a flexible, general-purpose system capable of testing multi-agent algorithms with a distributed control architecture, independent of specific hardware.

Before: Dell D610 Laptops

After: Raspberry Pi 3B
System Hardware
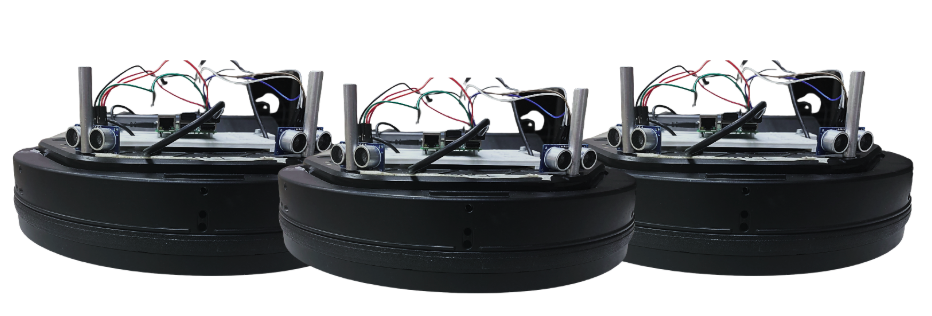
GP-MARS Platform with Raspberry Pi 3B microcontrollers.
The final GP-MARS system utilizes three Yujin Kobuki turtlebots as the mobile base units. To improve versatility, reduce mass, and lower the electrical load, the initial Dell D610 laptops used for processing were replaced with Raspberry Pi’s. This embedded setup allows for easy integration of various sensors like Lidar, stereo cameras, or proximity sensors.
Software Architecture

- Foundational Layer (OS): Ubuntu Linux (or Xubuntu on the memory-restricted Raspberry Pi 3B microcontrollers).
- Middleware (ROS): Provides hardware abstraction through its publish-subscribe communication model
- High-Level Control: High-level commands were programmed using Python
System Validation
Expiremental validation the system’s ability to test different multi-agent algorithms:
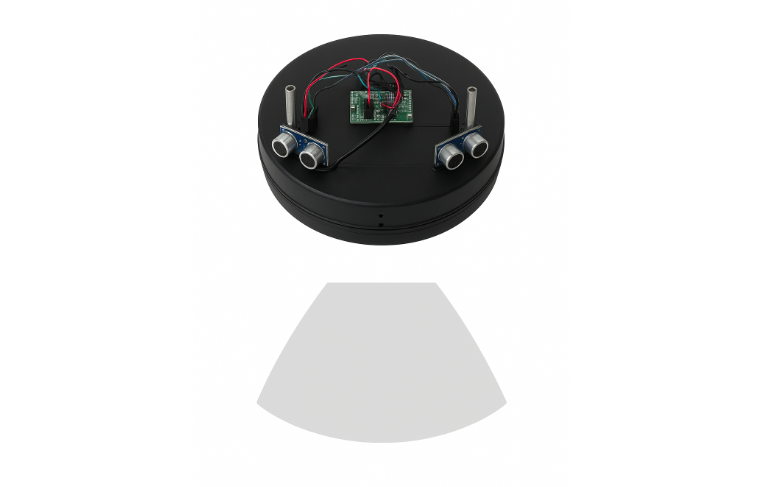
Kobuki sensor blind spot illustration
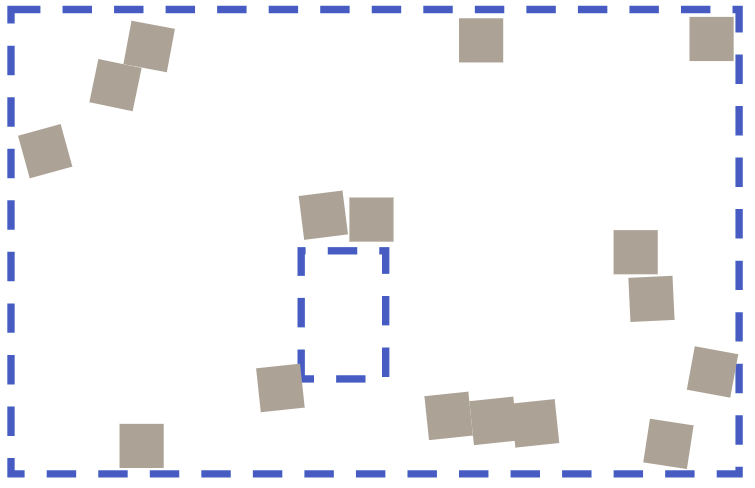
Final state of the object manipulation experiment
Cooperative Object Manipulation (Distributed Control)
- Goal: Demonstrate the individual robots’ ability to collaborate and manipulate objects to achieve a common goal.
- Setup: Each robot was equipped with two high-frequency ultrasonic sensors mounted at an angle to intentionally create a blind spot in the frontal field of view (Figure 4). The robots were placed in an enclosure with randomly scattered cube obstacles (Figure 5).
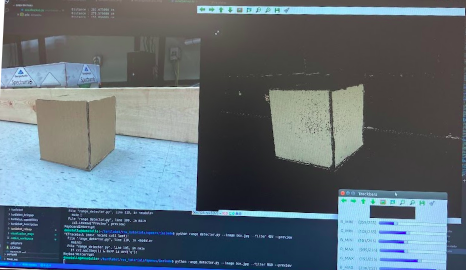
- Algorithm: A randomized obstacle avoidance program utilized proximity data. Due to the blind spot, the robot would collide with and manipulate the cube until it was pushed up against another object (Figure 7).
- Result: The multi-unit network successfully collaborated, with all cubes pushed against the walls of the enclosure or another cube, demonstrating cohesion and integration.
Left: Final state of the object manipulation experiment (Figure 7). Right: Kobuki sensor blind spot illustration (Figure 4).
Future Work
- Research Applications: Implementing and testing modern path planning and cooperative behavior algorithms
- Potential Improvements: Integrating additional sensing platforms, such as Lidar and stereo camera arrays
- Educational Applications: Suitable for undergraduate robotics courses on distributed systems and multi-agent coordination
Acknowledgments
This research was conducted for the Hope College Control Systems lab under Dr. Miguel Abrahantes.